Collaborative Sanding Assist System
Introduction
In Boeing’s Interiors Responsibility Center (IRC), aircraft interior panels are manufactured. These panels have a crushed core construction, consisting of three composite layers: inner and outer fiberglass layers, and a fiberglass honeycomb interior structure. Various part geometries are created by compressing the panel in a mold while it cures to set the part geometry. Next, paint or decorative laminates are applied. Prior to this operation, the panel must be sanded to increase adhesion. Furthermore, any defects are removed by applying Bondo, then sanded to match the original contour of the surface. Although this process is sufficient for producing quality aircraft parts, there are several ergonomic concerns for those who perform this sanding.
The majority of sanding in the IRC is performed using an air powered hand held random orbit sander. The vibration transmitted to the hand of the operator is an ergonomic risk which is actively being mitigated. For horizontal flat panels, tools exist, and are in development, which limit the vibrations imparted on the operator.
Shoulder injuries are also a concern due to the pressure required to effectively sand the surface. This issue is aggravated when the center of a large panel needs to be sanded, here the added reach increases strain on the shoulder. Weighted sanders can be used to alleviate some of this risk.
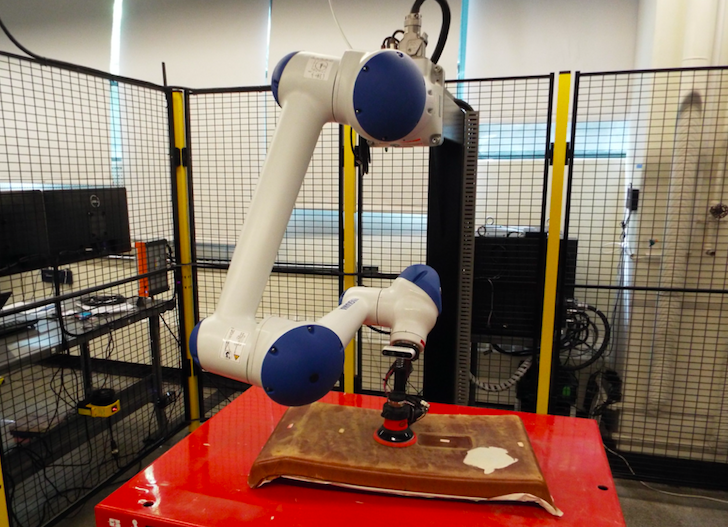
In some cases, standard industrial robots are used for high volume parts. However, most parts are not produced at a high enough volume for this approach to be feasible. To solve this problem, a robot was equipped with a depth camera, an orbital sander, and a force sensor. These sensors allow the robot to determine the part location, and sand the part with a given force. This robot will allow mechanics to sand parts of arbitrary and unknown shape with little to no ergonomic risk. Furthermore, using the same sensors, the material removal rate can be estimated.
Depth Camera
The depth camera is used to capture a point cloud representation of the working area of the robot. This point cloud is cleaned and normal vectors are estimated. After the processing is complete, the point cloud with normal vectors can be used to position the sander on the part surface.
Teleoperation
A game controller can be used to move the sander over the part surface. The controller allows the operator to move the sander in an X-Y plane while the system automatically compensates for part curvature. This allows the operator to sand the portions of a part which need it.
Scan to Path
Supplementing teleoperation is an algorithm to plan an automated path. This path is designed to cover the part and provide an initial “scuff sand”. Any areas that need more sanding can then be completed using teleoperation.
Material Removal Rate
Using the point cloud data, force sensor, and the orbital speed of the sander the material removal rate can be estimated. A closed loop controller was designed to maintain a constant material removal rate. This is beneficial when sanding a part with varying curvature. As the part curvature changes, the sander contact area changes dramatically. In turn, this causes a change in the material removal rate per unit area. Therefore controlling the material removal rate helps to avoid over-sanding areas of high curvature
Researchers involved include: Cameron Devine, Lance McCann, Sam Pedigo, Santosh Devasia and Joseph Garbini